FYSETC F6
Product Introduction¶
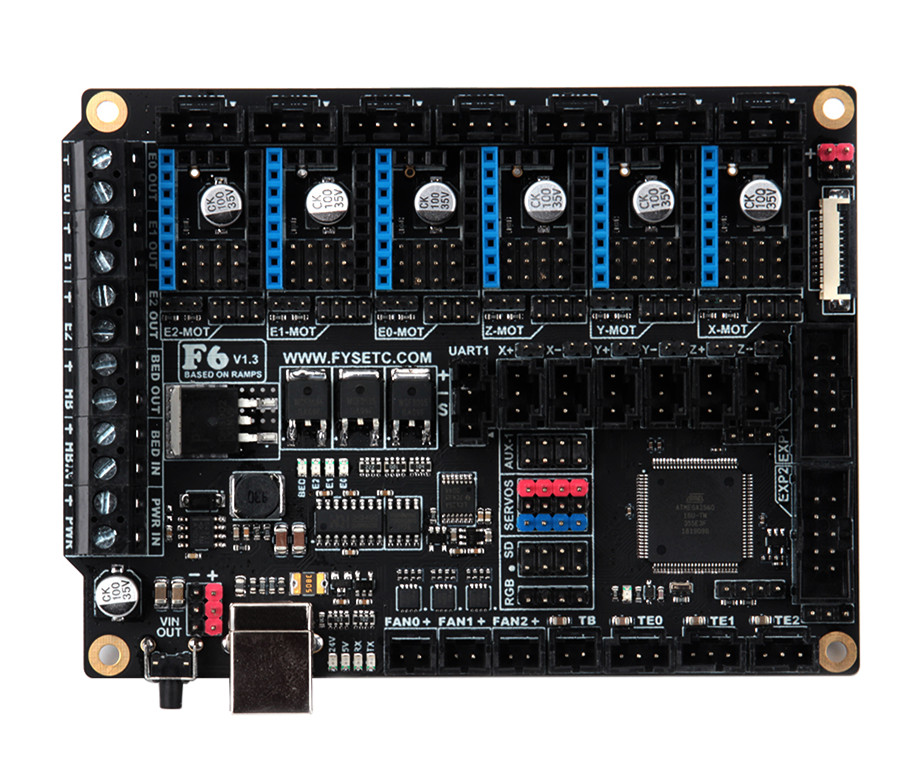
The FYSETC F6 board is a feature rich all-in-one electronics solution for 3D printer and other CNC devices. It provides six drivers slots and supports Pololu pin compatible stepper drivers, especially the TMC drivers modules. There is no need for flying wires when using TMC2100, TMC2130 and TMC2208. and SPI,Usart and ther pin configer functions are available.
Features¶
- Compact size: 117mm x 87mm
- fully integrated all in one solution:
- Arduino 2560-R3 compatible (works with Sprinter, Repetier-Firmware, Marlin out of the box)
- CH340 for high speed USB serial connection
- UNIVERSAL POWER:
- can be used with 9V-28V for motors / heated bed
- integrated high precision power regulators (DC/DC): 5V 3A Max
- power input auto selector for ATmega/logic (stand alone or power from USB)
- Easy DISPLAY + SD-CARD connector:
- RepRapDiscount SmartController compatible pin header on board
- 10P FPC for Serial Touch display
- 2X4 PinHeader Out for SD Card moudle
- Up to 6 motor drivers with easy micro-steps setup and Supports TMC driver without flying wire
- 10x PWM capable power mosfet outputs (1 for HotBed, 3 for Heat-End, 3 for fans, 3 for RGB LED strip)
- The Hot-Bed is designed as a separate power input for maximum current
- All unused pins are led out by pin headers
On Board External 2Mb SPI Flash- PCB:
- 4 layer
- 2OZ copper inner layers,1OZ out layers
- High quality, High temperature FR4-TG130 PCB
- Gold ENIG finishing
Application¶
- 3D printer
- CNC Device
- Other similar machines
Hardware Reasources¶
| Board Name | F6 |
|---|---|
| License | GPL V2.0 |
| Latest Version | V1.3 |
| Extruders | 3 |
| Fixed Fans | 5 Max |
| Controlled Fans | 3 Max |
| Heaters | 3 Max |
| Endstops | 6 Max |
| Temp sens | 4 Max |
| SPI | 1 |
| I2C | 1 |
| ISP | 1 |
| Serial port chip | CH340 |
| CPU | Atmega2560 |
| CPU Speed ( MHz ) | 16 Mhz |
| Stepper driver | 6 Max |
| Stepper driver Type | All StepStick compatible modules |
| Input | Main PWR:12-24V 10A Max;BED IN:12-24V 15A Max |
| Output | BED OUT:15A Max ;Heater Out:5A Max |
Jumper for different drivers¶
In order to support as many different drivers as possible, F6 sets a lot of jumper positions. Different drive modules require different jumpers. The following is a detailed description:
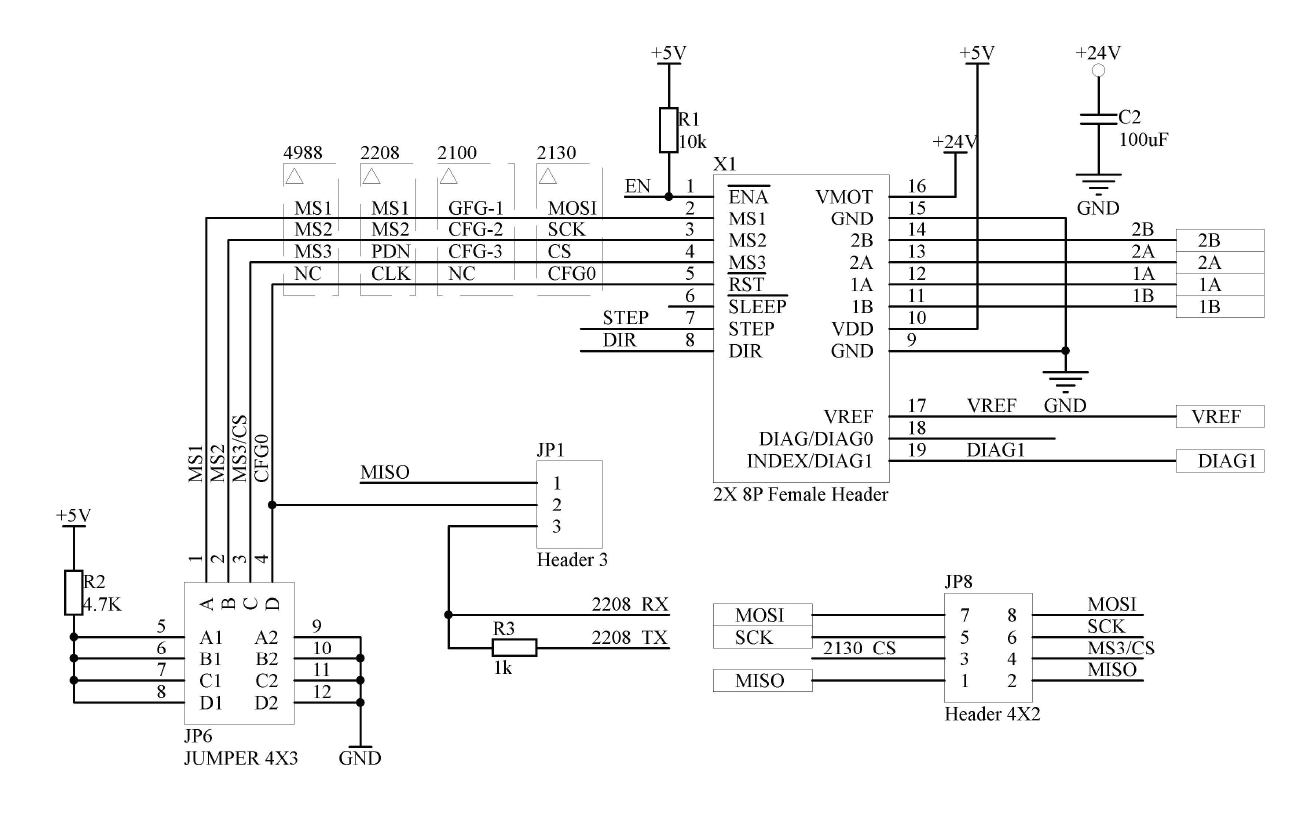
As shown in the schematic diagram above, there are three sets of jumpers in the drive section: JP1, JP6, and JP8. The different driver correspondences are shown in the following table:
| Divers Class | Used jumpers |
|---|---|
| A4988/DRV8825/THB6128/LV8729 | JP6(only ABC ways) |
| TMC2100 | JP6(only AB ways) |
| TMC2208 | JP1(Short 2&3)& JP6 |
| TMC2130 | JP1(Short 1&2)& JP8(Short All) |
1- A4988 and similar series¶
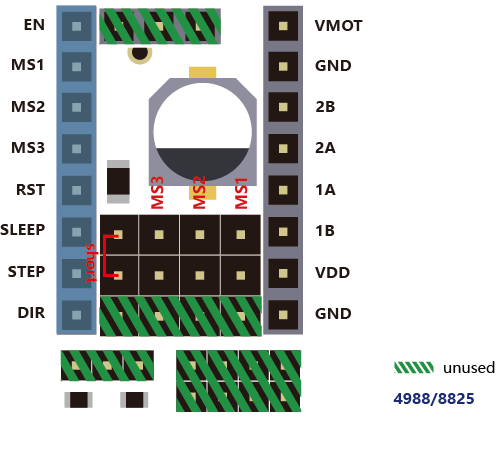
If you use the normal A4988 series module, you only need to set the jumper according to the position shown in the figure above, and you should not insert any jumpers in the shaded green part.
2-TMC2100¶
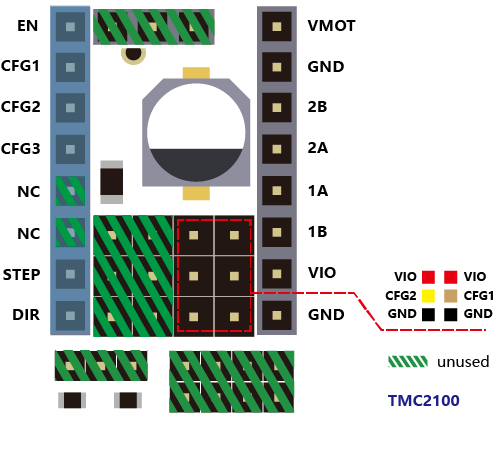
If you use the TMC2100 module and want to change its microsteps and mode settings, first you must ensure that the CFG1 and CFG2 of the 2100 module are connected by a pin next to it. (For the FYSETC version, you can only perform the welding configuration on the board. The default CFG1 And CFG2 is not connected to the pin header, and the connected version will be sold later)
3-TMC2208¶
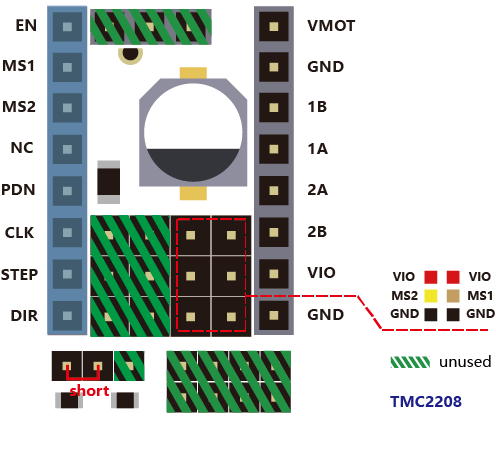
If you use the TMC2208, there are two modes to choose . FYSETC's 2208 is factory defaulted to standalone mode. At this mode, you can only set the microsteps by MS1 and MS2. If you want to config more , you need to enable PDN. First, You must make the jumper next to the PDN pin closed, and second, make sure that the 2 and 3 pin of the JP1 jumper next to the drive position on F6 board is connected , and then, you can make the configuration of the 2208 with marlin (SoftwareSerial).
4-TMC2130¶
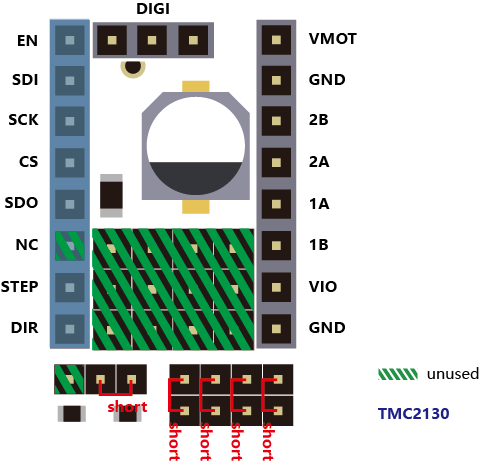
If you use the TMC2130, you should use the SPI mode. FYSETC has a version specifically for F6. The jumper settings on the motherboard are as shown above, and the shaded green part is not used. If you want to use the sensorless endstop function of the 2130, you also need to connect the jumper next to the limit switch socket. The corresponding position of each switch is: X- = X, X+ = E2, Y- = Y, Y+ = E1, Z- = Z, Z+ = E0, then configure the firmware, you can use all the features of the 2130.
Pin Definition¶

/**
* Mini-Rambo pin assignments
*/
#define X_MIN_PIN 63
#define X_MAX_PIN 64
#define Y_MIN_PIN 14
#define Y_MAX_PIN 15
#define Z_MIN_PIN 12
#define Z_MAX_PIN 2
//
// Z Probe (when not Z_MIN_PIN)
//
#ifndef Z_MIN_PROBE_PIN
#define Z_MIN_PROBE_PIN -1 // Z-min is recommended, of course, it can be any other idle pins.
#endif
//
// Steppers
//
#define X_STEP_PIN 54
#define X_DIR_PIN 55
#define X_ENABLE_PIN 38
#define Y_STEP_PIN 60
#define Y_DIR_PIN 61
#define Y_ENABLE_PIN 56
#define Z_STEP_PIN 43
#define Z_DIR_PIN 48
#define Z_ENABLE_PIN 58
#define E0_STEP_PIN 26
#define E0_DIR_PIN 28
#define E0_ENABLE_PIN 24
#define E1_STEP_PIN 36
#define E1_DIR_PIN 34
#define E1_ENABLE_PIN 30
#define E2_STEP_PIN 59
#define E2_DIR_PIN 57
#define E2_ENABLE_PIN 40
/* DIAG没有直接和MCU相连,使用时请插上对应限位开关旁的跳线帽.
* DIAG is not directly connected to the MCU. Please close
* the jumper next to the limit switch socket when using it.
*/
#define X_CS_PIN 70
#define Y_CS_PIN 39
#define Z_CS_PIN 77
#define E0_CS_PIN 47
#define E1_CS_PIN 32
#define E2_CS_PIN 42
#define X_TMC2130_DIAG -1
#define Y_TMC2130_DIAG -1
#define Z_TMC2130_DIAG -1
#define E0_TMC2130_DIAG -1
#define E1_TMC2130_DIAG -1
#define E2_TMC2130_DIAG -1
#if ENABLED(HAVE_TMC2208)
/**
* Software serial
*/
#define X_SERIAL_RX_PIN 71
#define X_SERIAL_TX_PIN 72
#define Y_SERIAL_RX_PIN 73
#define Y_SERIAL_TX_PIN 75
#define Z_SERIAL_RX_PIN 78
#define Z_SERIAL_TX_PIN 79
#define E0_SERIAL_RX_PIN 76
#define E0_SERIAL_TX_PIN 77
#define E1_SERIAL_RX_PIN 80
#define E1_SERIAL_TX_PIN 81
#define E2_SERIAL_RX_PIN 22
#define E2_SERIAL_TX_PIN 82
#endif
//
// Temperature Sensors
//
#define TEMP_0_PIN 12 // Analog Input
#define TEMP_1_PIN 13 // Analog Input
#define TEMP_2_PIN 14 // Analog Input
#define TEMP_BED_PIN 15 // Analog Input
//
// Heaters / Fans
//
#define HEATER_0_PIN 5
#define HEATER_1_PIN 6
#define HEATER_2_PIN 7
#define HEATER_BED_PIN 8
#define FAN0_PIN 44
#define FAN1_PIN 45
#define FAN2_PIN 46
//
// Misc. Functions
//
#define SDSS 53
#define LED_PIN 13
#if ENABLED(RGB_LED) || ENABLED(RGBW_LED)
#define RGB_LED_R_PIN 3
#define RGB_LED_G_PIN 4
#define RGB_LED_B_PIN 9
#define RGB_LED_W_PIN -1
#endif
#ifndef FILWIDTH_PIN
#define FILWIDTH_PIN 10 // Analog Input on endstop X+
#endif
// define digital pin 10 for the filament runout sensor. Use the digital input 10 on the servos connector
#define FIL_RUNOUT_PIN 10
// define digital pin 11 for the PS_ON control. Use the digital input 11 on the servos connector
#ifndef PS_ON_PIN
#define PS_ON_PIN 11
#endif
//////////////////////////
// LCDs and Controllers //
//////////////////////////
#define LCD_PINS_RS 16
#define LCD_PINS_ENABLE 17
#define LCD_PINS_D4 23
#define LCD_PINS_D5 25
#define LCD_PINS_D6 27
#define LCD_PINS_D7 29
#define BEEPER_PIN 37
#define BTN_EN1 31
#define BTN_EN2 33
#define BTN_ENC 35
#define SD_DETECT_PIN 49
#define KILL_PIN 41
Operation Guide¶
Step1: USB Driver¶
F6 used a cheap but stable chip for USB to seriel ,CH340,The Driver is here:https://github.com/FYSETC/CH340-Driver
Step2: FYSETC Arduino Plugin¶
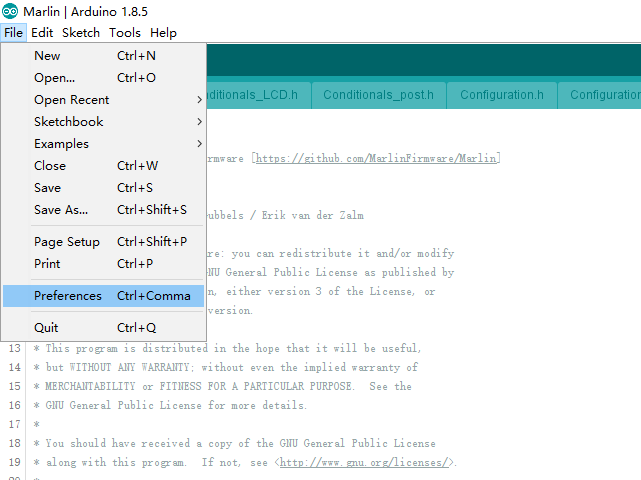
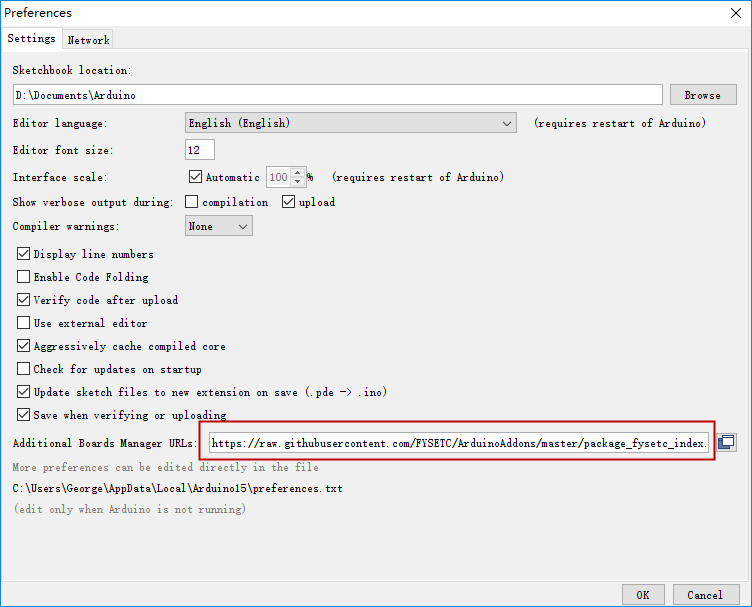
- Instead of manually installing the FYSETC addon's you can now install them from the Arduino Board Manager. From the Arduino File menu select Preferences.
- Add the following URL to "Additional Board Manager URLs" section.
https://raw.githubusercontent.com/FYSETC/ArduinoAddons/master/package_fysetc_index.json
- Open the “Boards Manager”.
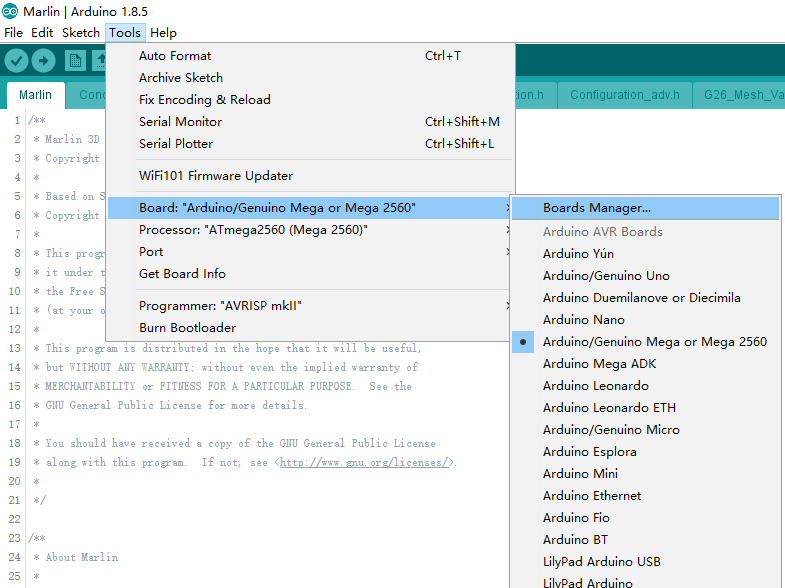
- Search the "FYSETC_F6"
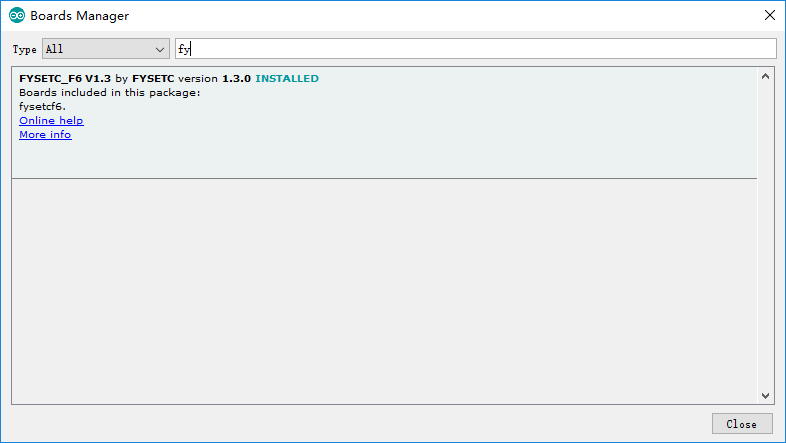
If you want to use F6 V1.4 , you need to update the addon to 1.4.0

- And then install it.
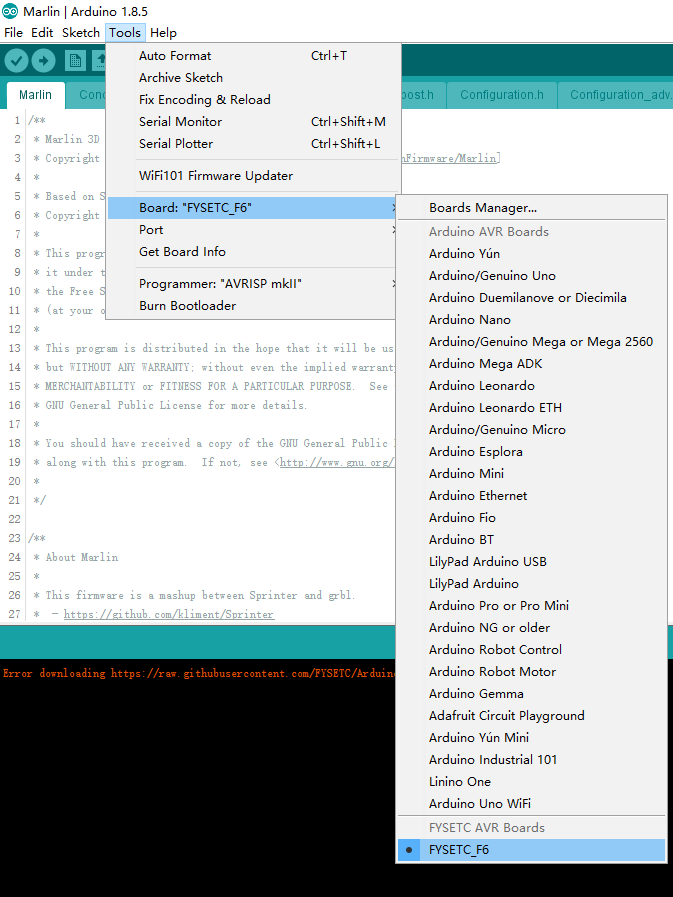
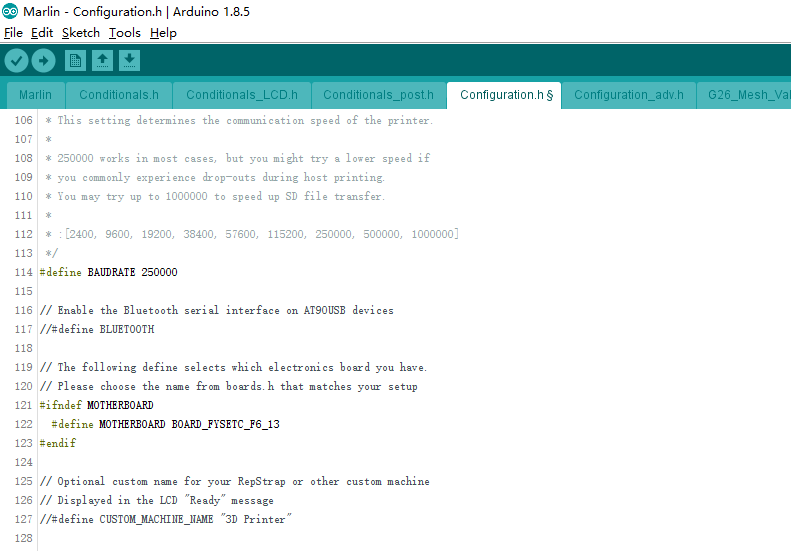
Step3: Configure firmware¶
- Change the board type configuration in configuration.h
F6 V1.3: BOARD_FYSETC_F6_13
F6 V1.4: BOARD_FYSETC_F6_14
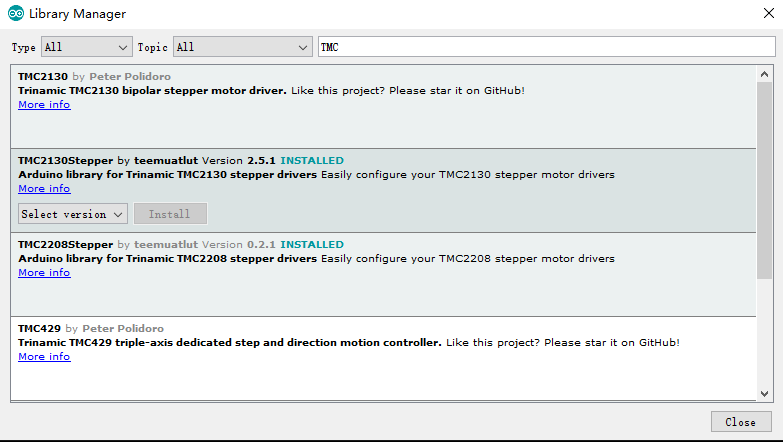
Step4: Install TMC2130/TMC2208 library¶
If you want to use the 1.1.x version frimware ,and you want use TMC2130/TMC2208 driver , you need to install TMC2130/TMC2208 library.
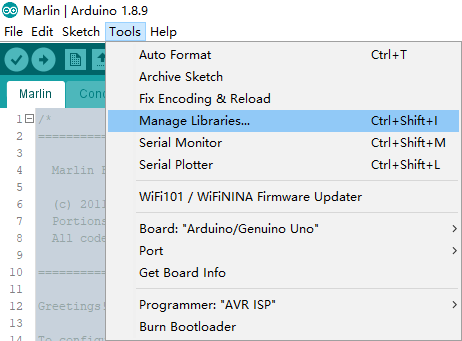
Click "Manage Libraries" .
Type "TMC" and Enter to search for TMC2130/TMC2208 library by teemuatlut. Click 'Install' button to install the library.
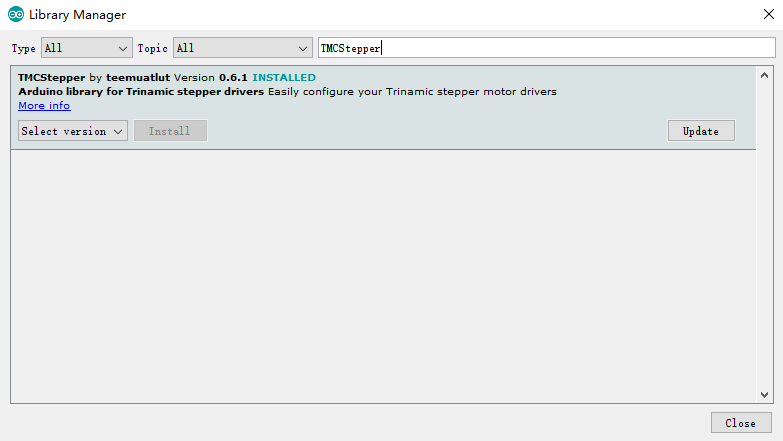
Step5: Install TMC library¶
If you want to use the 2.0.x version frimware , and you want to use TMC stepper drivers , you need to install TMCStepper library.
Click "Manage Libraries" .
Type "TMCStepper" and Enter to search for TMCStepper library by teemuatlut. Click 'Install' button to install the library if you did not install it.
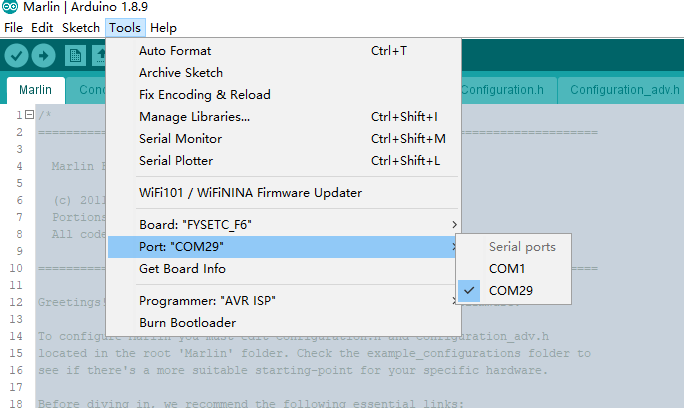
Step6: Connect the USB cable¶
Connect a USB cable between your computer and the machine.Then click Tools->Port and select the COM port.
Step7: Upload¶
Click the arrow button to upload.
Attachments¶
Shop¶
Tech Support¶
Please submit any technical issue into our forum