蜘 蛛 宝 典¶
用蜘蛛3.0主板玩转Voron2.4
本教程基于大树代笔的葵花宝典第一版更新修改版权所有,未经许可,切勿用作商业用途,违者必究!
前言¶
大家好,当你看到这篇文章,我想你一定是对一台叫做Voron的3D打印机产生了兴趣,或者你正在组装一台属于你自己的Voron2.4打印机。的确,Voron是非常棒的全球开源3D打印机项目。无论从外观设计、功能先进性到最终优秀的打印效果,都是创客手中不可多得的必备工具。Voron官方为每一个机型都准备了机械安装手册,但是很多爱好者都卡壳在电控方面的安装和调试。为了能让大家少走弯路,我决定整理一份关于Voron2.4的电控教程,帮大家避避坑。能力有限,还望大家多多提出宝贵意见。
大家也可以访问VoronDesign的官方网站www.vorondesign.com或中文网站www.cnvoron.com获取更多有关开源Voron打印机的相关信息。

安全¶
重要的事当然是放在最前面说啦。在Voron2.4电子线路布线时,你会用到交流220V市电。在接触任何带电的电线或端子之前,请务必拔掉打印机的插头,且等待1-2分钟,确保电源中的所有电容已放电。很多机友家中的三脚插座可能没有按规范接线,火线零线接反,还有些插座内没有接地线,或者全屋接地悬空。如果对自己家的插座不放心,可以买个简易测试仪(如下图)测试一下。为了确保人身安全,请确保打印机的框架可靠接地,并使用带有漏电保护功能的插座、接线板。

打印机通电时,切勿插拔任何设备(无论是高电压或低电压)除了存在安全隐患外,还很可能会损坏电子元件。特别值得注意的是步进驱动器,在通电时插拔步进电机的线束,很容易造成驱动器的永久损坏,切记!切记!切记!
1、硬件篇¶
1.1 蜘蛛是个啥¶
这里说的蜘蛛可不是八脚恐怖爬虫,而是Spider主板,是深圳富源盛电子科技有限公司FYSETC全新打造的一款可以支持8路步进电机的3D打印机控制主板。
1.2 蜘蛛主板的参数和特性¶
-
外观尺寸: 155.3mm x 76.5mm
-
基于 STM32F446 180Mhz 主控设计,所有 IO 都能承受 5V 电压
-
支持8 路 TMC 电机驱动,支持 UART及SPI 协议
-
V2.2:增加两个最大 60V 电压支持的电机驱动插座,改进TMC驱动跳线设置,更简单、更容易
-
V2.2: 最大 28V 输入,集成 12V@3A DC-DC,5V@5A DC-DC (用于树莓派),5V@3A DC-DC ( 用于MCU 和 RGB ) , 两路 3.3V@0.8A LDO ( 用于MCU 和电机 )
-
配置两路汽车保险丝为主电源输入和热床输入提供保护
-
限位开关 24V/5V/3.3V 三级电压可选,同时支持更多的位置检测设备,如接近开关,BL-Touch 等
-
XH2.54 接插件
-
10路 PWM 功率场效应管输出(1路热床,3路热端,3路风扇,3路 RGB 灯带)
-
V2.2: 支持最多 6 路温度传感器
-
最多 8 路 PWM 风扇输出(在只有1个挤出头和无 RGB的情况下),支持2路 RGB 灯(12V & 24V 电压可选),1 路 5V RGB 灯(NEO-PIXEL / WS2812)
-
板载 RepRapDiscount SmartController 屏幕兼容接线插座
-
提供 2X5 树莓派串口及供电(5V@8A)接线端子
-
提供用于SD 卡外接模块的 2X4 接线端子
-
板载 micro-SD 卡座
-
Type-C 和 Type-B USB 接口可选
-
EXP1 & EXP2 提供更多复用功能,如 USART, I2C, CAN
-
支持 SD card & USB 固件上传
-
板载温度传感器端口 4.7k 0.1% 上拉电阻,可直接接 PT1000,PT100 也可通过运放模块接入。
-
V2.2: 增加更多保护电路 (每路电机驱动增加 TVS 管,限流电阻,增加 VMOT 保险丝)
1.3 蜘蛛主板的接线---电源输入、输出¶
很多新手会很迷茫,在拿到主板以后就迫不及待的把主板安装到机器上。其实一块新的主板还需要做很多的准备工作,确认可以正常工作了,再装到机器上接线,这样可以避免很多不必要的麻烦,先来看看怎么给蜘蛛主板供电吧。
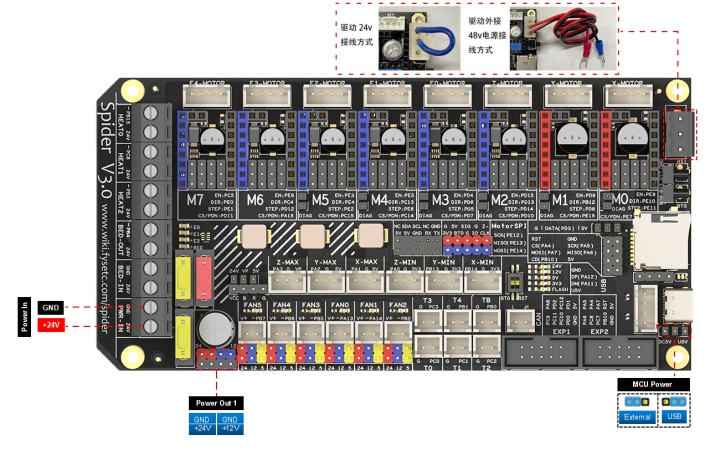
Power In:蜘蛛主板推荐使用24V供电,根据外设的数量,选用200-300W的优质开关电源供电(例如:明纬电源、普德新星电源)。使用AWG18# - AWG14#线从开关电源的DC输出端子接至主板Power In端子 。使用足够粗的供电线缆可以减小电压降,保障主板的稳定。
Power Out:可输出两路12V和两路24V电压,用于给其他外部设备供电,请注意总电流不要超过主板最大输出范围。
新增48V输出接口:为M1、M2驱动位输出电压提供更多选择。
选择48v / 24v 供电,电压输入端子接线如下图展示,驱动 24v 接线方式——短接24v-PIN与48v-PIN,驱动外接48v电源接线——短接48V-PIN和GND-PIN。
MCU Power:MCU供电选择跳线,可以由USB供电或由内部DC-DC电源供电,在烧录固件及调试主板时可以使用USB供电(EXP1和EXP2没有连接在USB供电上,所以仅由USB供电的时候连接在此处的设备不会工作,比如屏幕不会亮起),平常使用请选择内部DC-DC电源供电。
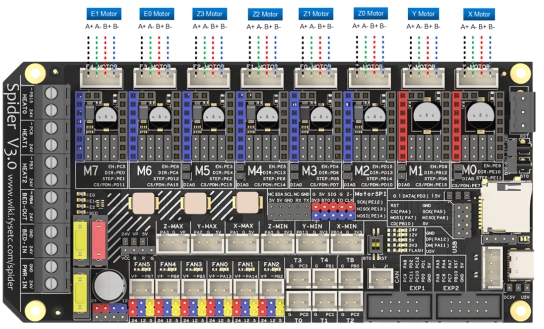
1.4 步进电机的接线¶
1.4.1 步进驱动器的跳线设置¶
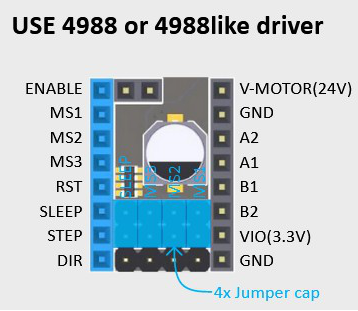
常见的步进驱动模块无外乎3种:一种是STEP/DIR模式。主要通过硬件跳线来设置细分,通过调电位器来改变电流大小,比如最常见最经典的A4988驱动。如果使用这类传统步进驱动,需要查询所使用的步进驱动厂家提供的细分配置表,然后用跳线帽来进行细分设置。 注意:高电平在上,低电平在下。
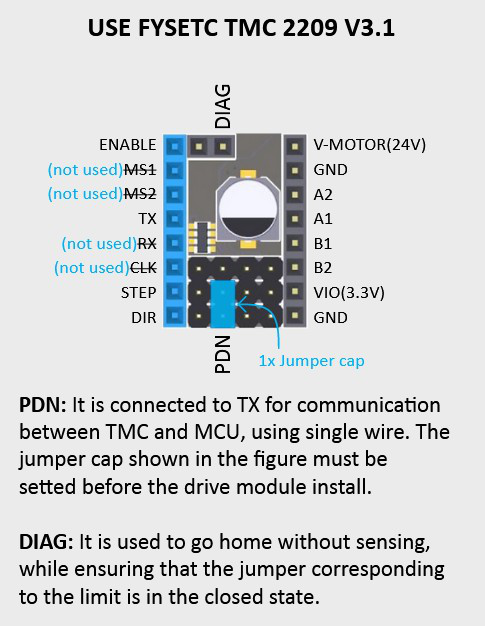
第二种是UART模式。最具代表性是德国Trinamic公司的TMC2208 TMC2209 TMC2225 TMC2226等,这类芯片可与主控IC进行Uart异步串行通信,所以细分设置、电流大小、静音功能等,都可以通过软件进行调节。UART模式时,需要按下图方式进行跳线设置。
第三种是SPI模式。最具代表性是德国Trinamic公司的TMC2230 TMC5160 TMC5161 TMC2240等,这类芯片可与主控IC进行SPI通步串行通信,通信速率更快,且这类芯片都具备一些高级功能,都需要通过SPI总线进行配置,例如堵转检测,电流动态控制,防抖动功能,静音驱动,斜坡发生器,力矩动态调节等等。SPI模式时,需要按下图方式进行跳线设置。
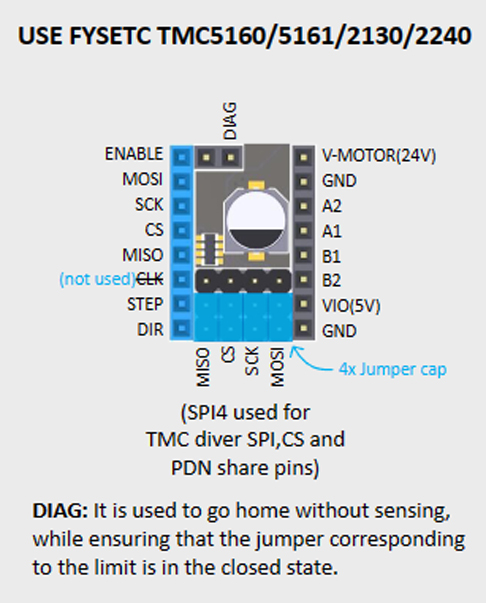
如果你使用的是其他厂家的步进驱动,引脚可能有所不同。请根据所购模块厂家提供的资料进行跳线、使用。
1.4.2 步进驱动器的安装¶
将驱动器附赠的散热片贴在**步进驱动器铜箔的顶部**,有条件的话,建议使用风扇对驱动器进行辅助散热,否则你可能会打印件错层等其他问题。这一点对于TMC 2208s尤为重要,因为它们具有更高的RDSon,在相同的电流下会产生更多的热量。 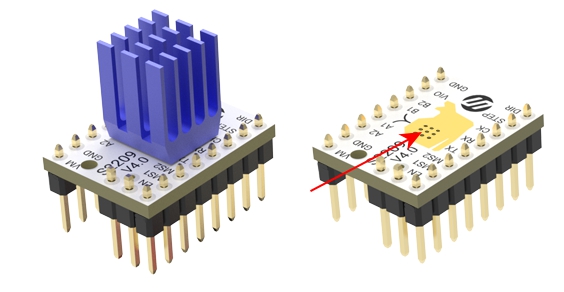
注意!!!
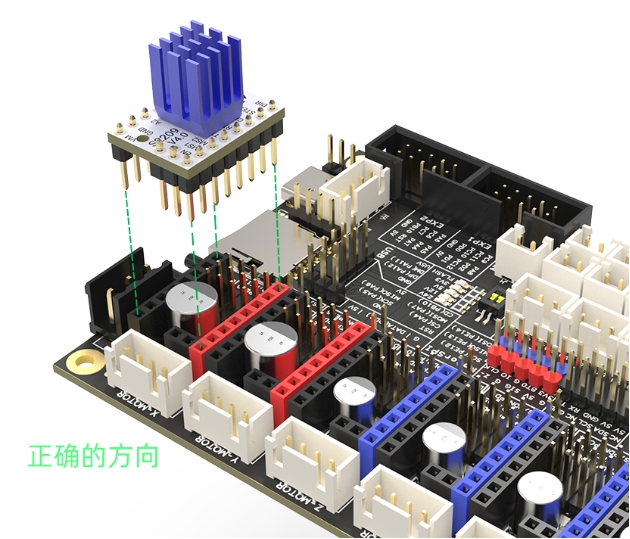
安装驱动模块时一定要确保方向正确。如果你把驱动器插反了,可能你会看见“昂贵的烟花”。步进驱动器的两排杜邦插座使用了不同的颜色,一排是黑色的,一排是蓝色的,请将驱动模块按颜色与插座的一一对应插入。
1.4.3 步进电机的接线¶
3D打印机一般使用的都是两相步进电机,其内部是由两组线圈绕制而成,原理图如下。使用万用表蜂鸣档测量步进电机的4根线,同相线圈的两根线会发出声音,不同相不会有声音。插座上½为一相,¾为另外一相,交换两相的位置可以变换电机转动方向。 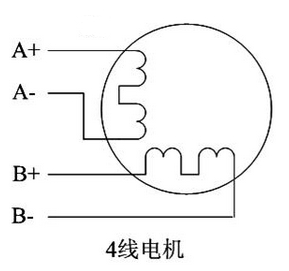
将XY电机、挤出机电机和4Z的电机(共7个电机)插入对应的插座(除X、Y电机有48V输出需求外,电机插座顺序和位置皆没有特别要求,但是配置的时候需要正确设置每个电机驱动的对应Pin脚)。
余出的1个驱动插座为预留的第二挤出机的电机驱动使用,如果不使用,可以不插驱动器。
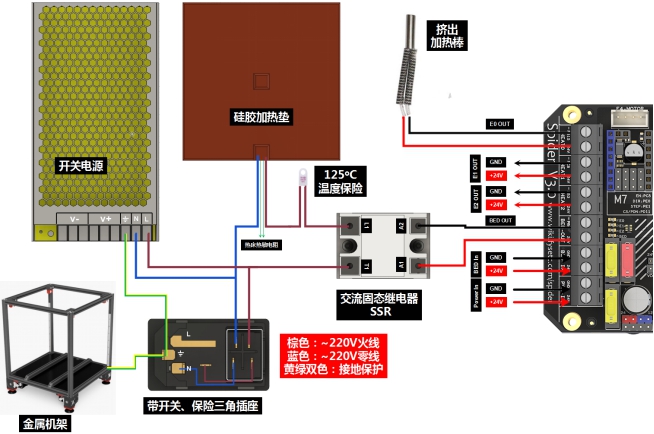
1.5 热床、喷头加热块接线¶
Voron2.4是一款可以封箱打印高温材料的打印机,所以需要一款大功率的交流热床,才能在打印过程中保障床身温度的稳定及仓温的稳定。一般的打印机主板不能直接控制交流热床,需要借助交流固态继电器(SSR)来进行控制,具体的接线见下图。
**加热棒**的接线不区分正负极,请将加热棒接至主板**E0 OUT**接口。
**注意!!!**为确保用电安全,请将金属机架进行可靠接地。
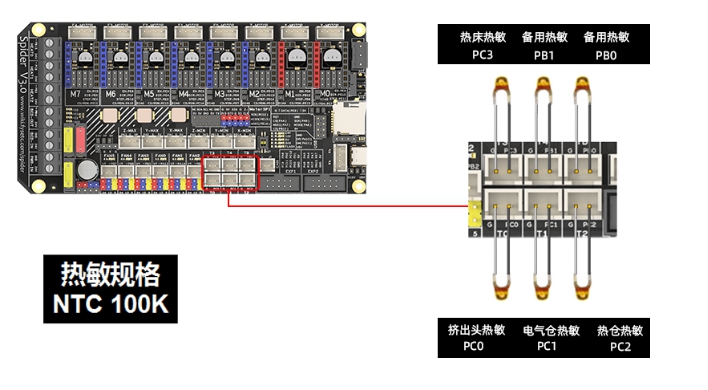
1.6 温度传感器的接线¶
蜘蛛主板可以接入6路温度传感器,可以满足Voron2.4的测温需要。常规的NTC100K热敏电阻可按照下图接线方式直接连接:
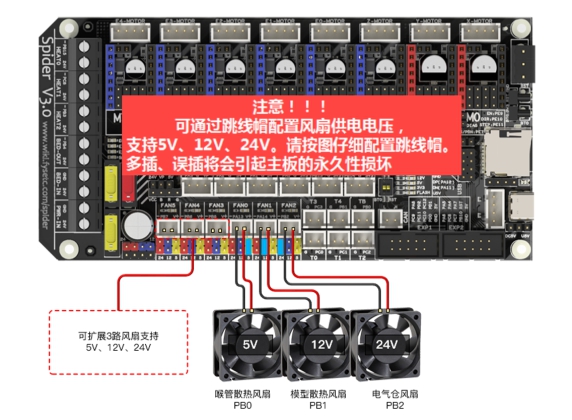
1.7 散热风扇的接线¶
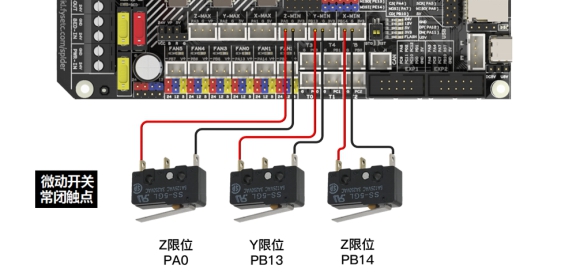
1.8 限位传感器的接线¶
限位开关有常开(NO)和常闭(NC)之分。在Voron2.4的机型上,我建议大家使用常闭(NC)的方式(如下图),这样在线缆开路或者开关触点接触不良时,软件会有报错提示,可以避免因复位开关失灵而导致的撞头。
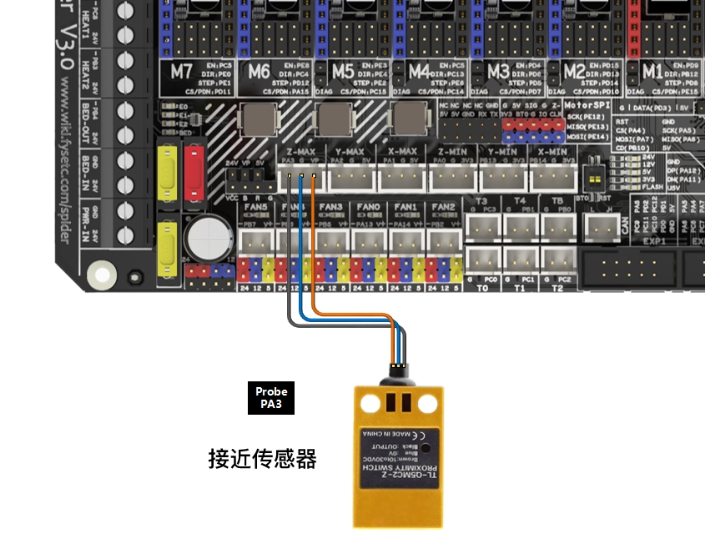
1.9 Probe调平传感器¶
Voron2.4官方建议使用的是PL08N传感器来进行热床调平,由于PL08N是使用24V供电,它的输出引脚在高电平状态下为24V,这大大超出了MCU 引脚的耐受范围。蜘蛛主板的Z+端口,内置了BAT85二极管用作高低电平隔离,所以可以直接将PL08N传感器直接插入Z+端口,而不需另外去外接二极管。另外Z+端口的供电是可以通过跳线帽去选择的,在使用PL08N传感器时,请将跳线帽按下图位置插入。
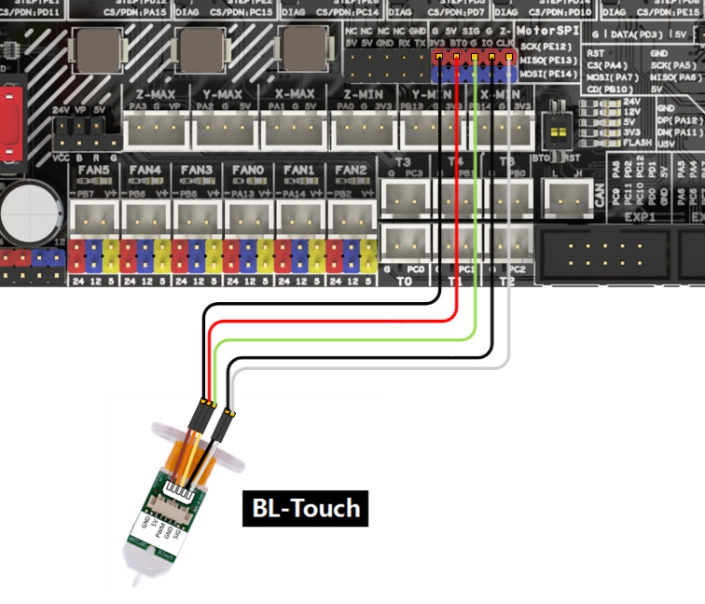
由于市面上很少能买到PL08N的正品,所以很多网友想改用BL-Touch传感器来进行热床调平。BL-Touch需要3根线为舵机供电,2根线用作信号的输出,使用时按上图所示进行连接,请仔细确认连线是否正确
注意:BL-Touch是5V供电的器件,必须要按上图将Z+的供电跳线插入5V端。错误的电压设置可能会永久性损坏主板及传感器,切记切记切记!!!
 ¶
¶
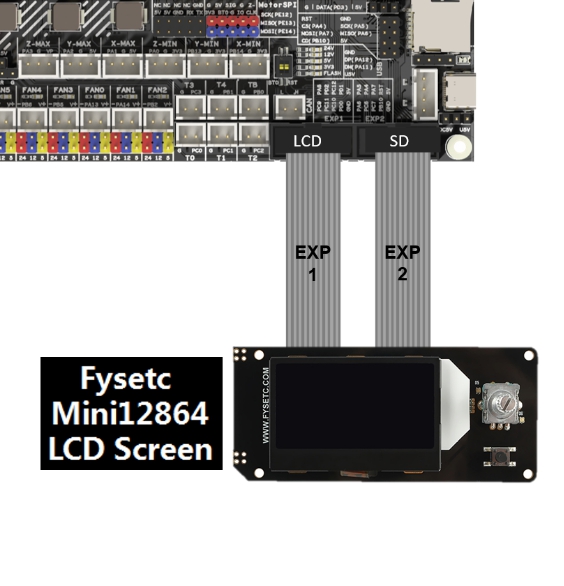
1.10 Mini12864接线¶
Voron2.4官方推荐是字符型的Mini12864显示屏,需要使用2根16pin的排线将Mini12864与蜘蛛相连接,排线和插座有防呆设计,直接将排线插头的凸起点对准插座的缺口插入即可。
注意:在连接排线的时候,Spider需要按照下图的提示,Exp1对exp1,Exp2对exp2,否则可能无法正常点亮显示屏,切记切记切记!!! 由于各个厂家的引脚定义不同,如需连接其他厂家的Mini2864,可以至FYSETC-SPIDER说明文档查看相关信息。
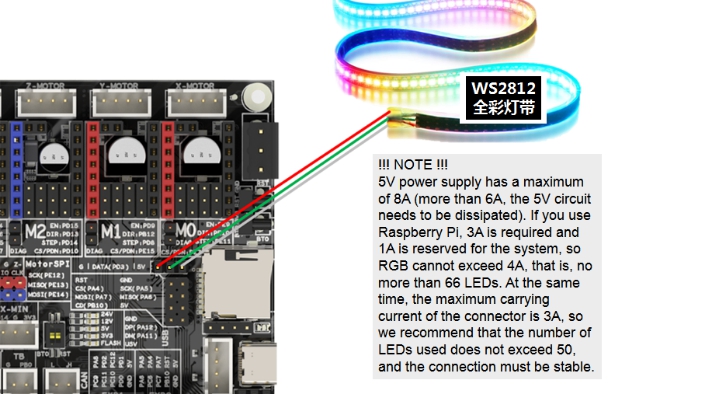
1.11 RGB灯带接线¶
为了让机器机箱内更漂亮更炫,可以在机箱内使用RGB全彩灯带来作为氛围灯,并且可以编辑一些自定义的宏,让灯带自动的变换颜色。这里给大家介绍的是采用内置WS2812驱动的灯带,它主需要一组5V供电和1根信号线,便可以控制灯带的色彩、亮度的变换。蜘蛛主板提供了专用的接口,接线方式如下图。
注意:主板5V最大输出8A(当输出电流大于6A时,DCDC电路需要加散热片)。如果你的蜘蛛主板同时也在给树莓派供电,那么建议RGB灯带不要超过50个灯珠,以免主板电压不稳定,影响到打印。
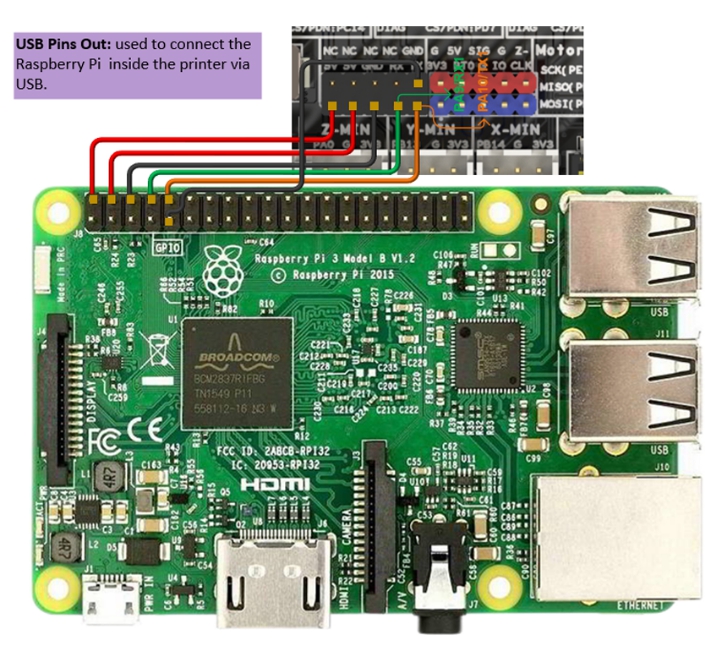
1.12 树莓派接线¶
蜘蛛主板提供了2种通讯方式与树莓派连接,一种是使用USB端口,一种是Uart端口,并且蜘蛛主板可以直接为树莓派供电,这样可以省去单独的5V开关电源。下面我来介绍下两种方式。
1.12.1 蜘蛛主板与树莓派的连接--Uart¶
可以使用蜘蛛主板包装内附送的线束,按下图所示方式将蜘蛛主板与树莓派进行连接,在主板接通24V电源的同时,树莓派也将得电启动。
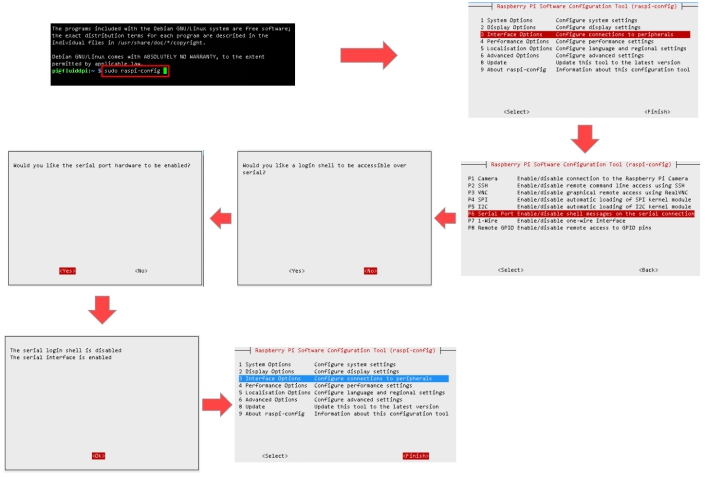
由于树莓派3、3B、4等型号,板载的蓝牙串口占用资源,需要通过下列操作,将串口功能重新映射到GPIO14和GPIO15后才可正常工作。
第一步
输入以下命令配置树莓派串口
sudo raspi-config
=> Interfacing Option=> Serial Port=> NO=> YES=> OK=> Finsh
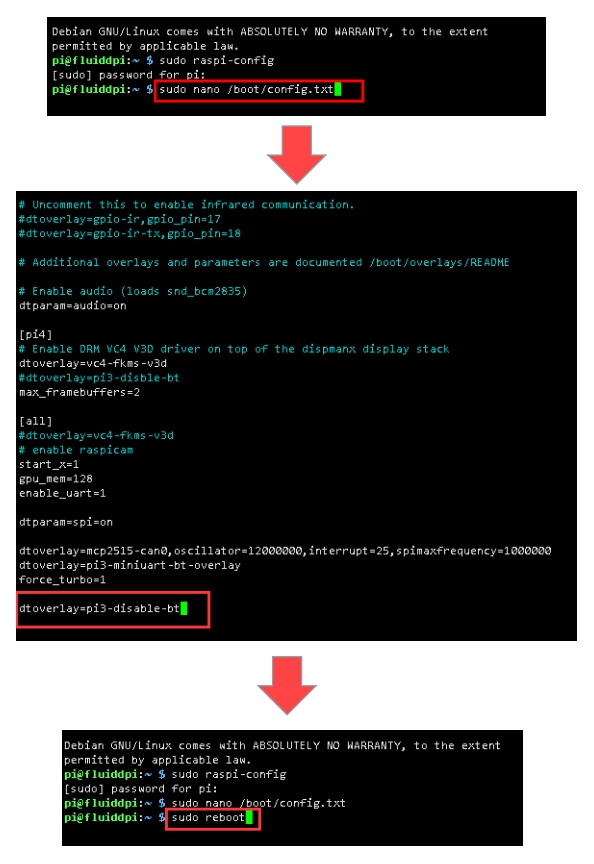
第二步
输入以下命令编辑/boot/config.txt
sudo nano /boot/config.txt
=> 在文件最底部添加如下字段 :
dtoverlay=pi3-disable-bt
保存退出,输入一下命令重启
sudo reboot
第三步
sudo nano /boot/cmdline.txt
=>删除以下字段 : "console=serial0,115200"或者 "console=ttyAMA0,115200"
sudo reboot
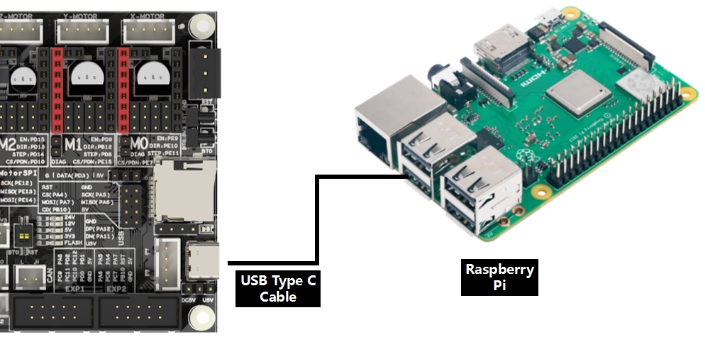
1.12.2 蜘蛛主板与树莓派的连接--USB¶
使用USB Type C线缆连接蜘蛛主板与树莓派,此时树莓派供电可以使用上述Uart线束,或者使用其他5V电源给树莓派供电也可。
使用USB方式连接,不需要进行特别的软件设置。
以上介绍了基本硬件的连接及注意事项,机友们在接线过程中一定要仔细看清楚,通电前再次的仔细检查,特别是供电的线束正确的连接,避免烧毁硬件,影响装机的心情。