SB CAN ToolHead.zh

1. 简介
SB CAN 工具板是一个高度集成的打印头控制板。基于STM32F072,运行Klipper固件。板载TMC2209步进电机驱动,AXL345加速度传感器,以及其他必要的接口。并附带2.5米4芯连接线,便于开箱即用。
1.1 特性
-
基于STM32F072
-
板载1M CAN收发器
-
板载TMC2209
-
2x 0.5A MAX PWM接口,用于可控风扇(默认VIN供电,5V可选)
-
1x 信号输入接口(VIN供电,带电平转换)
-
2x 信号输入输出接口 (5V供电,带上拉电阻)
-
1X 5V 单线RGB接口 (1A MAX)
-
1x 4A MAX PWM输出,用于加热棒
-
1x ADC接口,用于加热棒温度采集
-
MX3.0 2X2接口,用于电源和CAN信号接入
-
1x Micro USB,用于固件更新
-
附带2.5米4芯连接线,2x16AWG+2x24AWG
-
附带端子外壳和压线金属片
2. 硬件指南
2.1 安装
STLs 可以在国内 git 站点找到:FYSETC/FYSETC-SB-TH-CAN - FYSETC-SB-TH-CAN - FYSETC Git,需要把替换 SB 原装的三个打印件以及增加一个小安装件。配件是为VORON Stealthburner 头结构设计的单板解决方案,其安装如下图所示,5个步骤完成:

- 你的Stealthburner应该拥有两个安装孔,并已经嵌入了螺母;
- 打印一个隔离柱用于安装PCB;
- 将板子对准孔位放置;
- 安装附赠的薄头M3螺丝(普通的螺丝可能会导致加热棒端子不易插拔);
- 按照接线指南连接好外设,盖上Stealthburner的盖子即可。
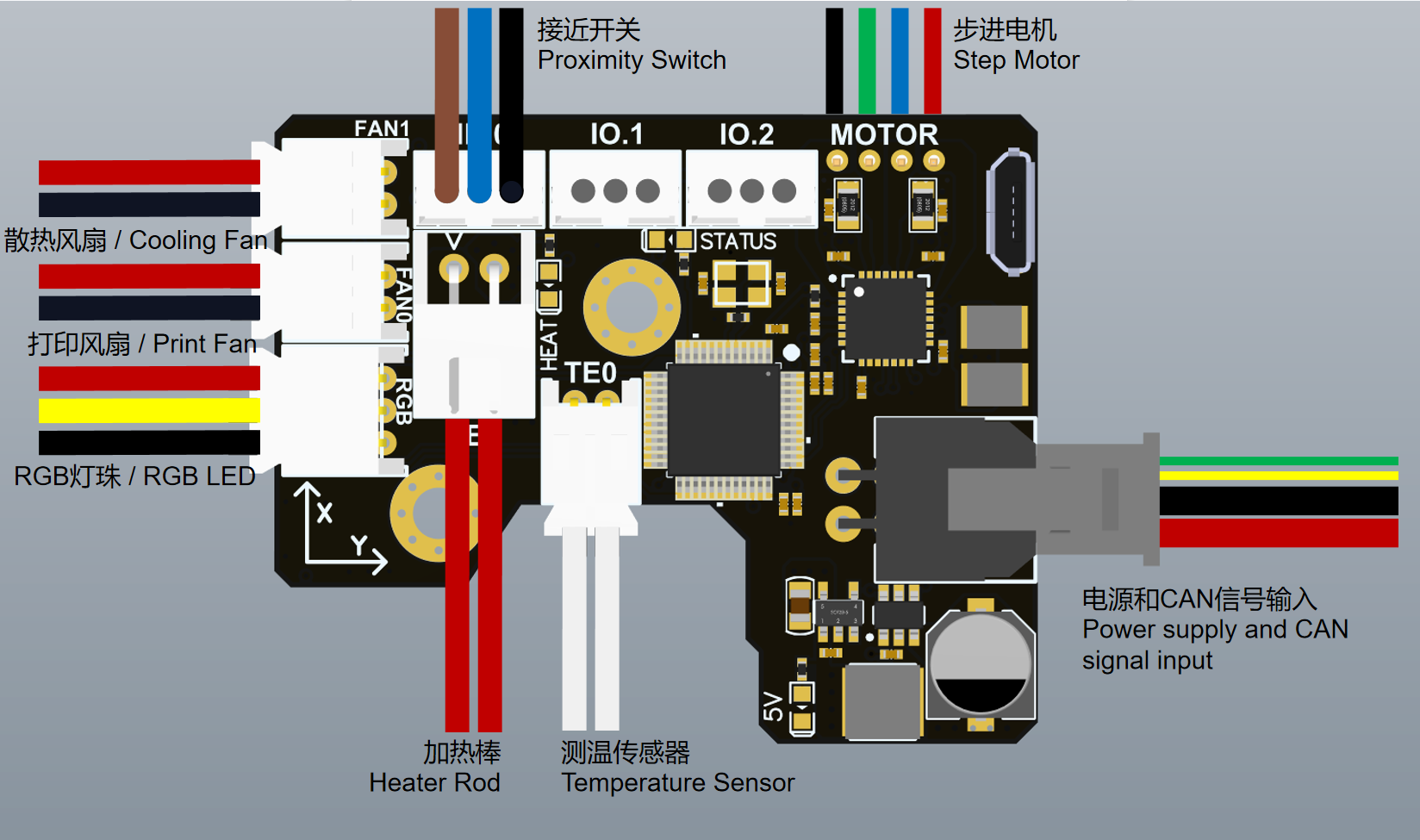
2.2 接口说明
| 端子名称 | 端子型号 | 说明 |
|---|---|---|
| IO.2 | PH2.0-3P | PB7,可以用做输入/输出,硬件上拉10K到3.3V,串联1K电阻。 如:限位开关 |
| IO.1 | PH2.0-3P | PB11,可以用做输入/输出,硬件上拉10K到3.3V,串联1K电阻。 如:限位开关 |
| IN.0 | PH2.0-3P | PB6,默认24V供电,带电平转换,默认3.3V上拉 |
| MOTOR | PH2.0-4P | TMC2209 EN : PB4 DIR : PA5 STEP : PA7 SPREAD : PA15 DIAG : PB5 INDEX : PB3 RX : PA10 TX : PA9 |
| INPUT | MX3.0 2X2P | 输入24V,最大5A(16AWG)/CANL,CANH (24AWG) |
| TE0 | PH2.0-2P | PA0,ADC,4.7K电阻上拉到3.3V,用作喷头测温 |
| HE0 | XH2.54-2P | PA8,最大4A,PWM控制输出,用作加热棒,建议不超过60W |
| FAN0 | PH2.0-2P | PA2,0.5A MAX PWM接口,用于可控风扇(默认VIN供电,5V可选) |
| FAN1 | PH2.0-2P | PA3,0.5A MAX PWM接口,用于可控风扇(默认VIN供电,5V可选) |
| RGB | PH2.0-3P | PB1,1A MAX 单线RGB接口 5V电平,如NeoPixel,WS2812等 |
| Micro-USB | 用于固件烧录/更新:先插上USB(带电),再接24V电源,电脑即可识别出DFU端口。 用于 USB 通信:先接 24V 电源,后接 USB |
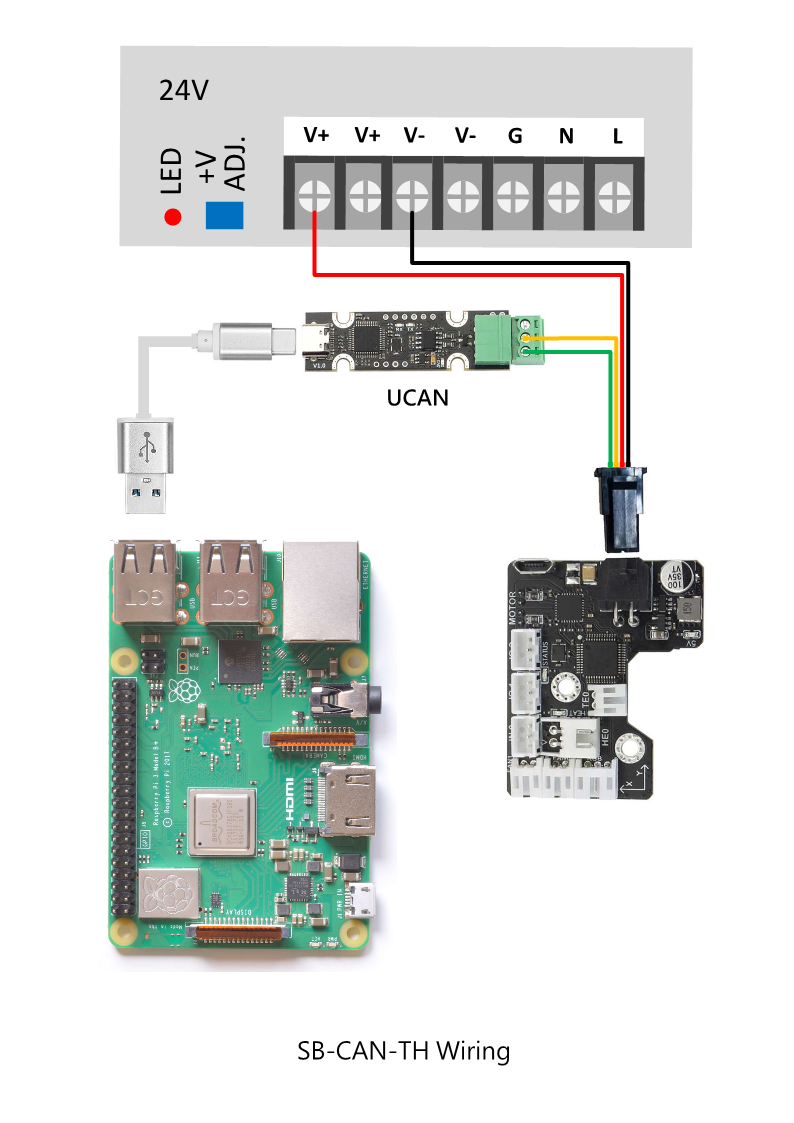
2.3 接线
如下图所示,您不仅收到一个 SB CAN Tollhead Board,还收到一根 2.5 米连接线和一些连接器以及一条 USB 电缆。

V1.1
V1.3

Klipper目前支持主板的USB to CAN Bridge模式。 您可以将主板用作 Raspberry Pi 上的 CAN 适配器,不再需要 UCAN。
2.4 SCH DXF STEP 文件
请查看国内 git 网站 http://git.fysetc.com.cn/
3. 固件指南
此 CAN 板目前只支持 Klipper 固件,如果你是初学者可以先查看 安装 Klipper 文档 : Installation - Klipper documentation
3.1 menuconfig

3.2 固件上传
板子设置了一个垂直于板面的Micro-USB接口,用于固件烧录和更新。使用时按照以下步骤操作:
不要对24V进行热插拔,会有一定概率损坏板子上的5A保险丝。可以将SB CAN ToolHead的24V插座插好,然后从电源处进行24V供电的通断!
对于V1.3版本,插上USB线后,按复位键即可,不再需要对24V进行重新上电操作!
- 给机器上电,等待树莓派(或者其他安装klipper的主机)完全启动;
- 断开SB CAN TH板的24V电源输入,等待5秒以上,确保完全断电;
- 将Micro-USB线的两端分别接在SB TH CAN板的Micro-USB口和树莓派的USB-A口;
- 接通SB CAN TH板的24V电源输入,确保5V电源指示灯亮起;
- 检查树莓派是否识别到对应的端口;
- 执行编译和烧录命令:
dfu-util -R -a 0 -s 0x08000000:leave -D out/klipper.bin - 完成后拔下Micro-USB线,并拔下SB CAN TH板电源输入,等待5秒以上,重新插入,给板重新上电;
- 固件烧录/更新完成。
3.3 Klipper 配置文件
在国内 git 站 FYSETC/FYSETC-SB-TH-CAN - FYSETC-SB-TH-CAN - FYSETC Git 获取配置文件 , 然后根据说明获取 CAN 口 ID: CANBUS - Klipper documentation:
4. 版本说明
4.1 v1.1 丝印错误
注意:V1.1版本存在几处丝印错误,框内为错误丝印,红色字体是正确的标识:

4.2 v1.3 更改说明
- 更改了最大可承载15A电流的连接器,和连接线(板载保险丝限制为8A);
- 增加一个复位按键;
- 更改为6层 2OZ PCB板,增强散热;
- 增加120R端接电阻,可以通过JP3进行断开,默认连接;
- 更改加热棒连接器以承载更大电流,最大7A;
购买
联系我们
QQ群:1041794121
Facebook小组:https://www.facebook.com/groups/197476557529090
Discord频道:https://discord.gg/Fb6FdND4
邮箱:support@fysetc.com