TMC2226
Product Introduction

The TMC2226 is an ultra-silent motor driver IC for two phase stepper motors. TRINAMICs sophisticated StealthChop2 chopper ensures noiseless operation, maximum efficiency and best motor torque. Its fast current regulation and optional combination with SpreadCycle allow highly dynamic motion while adding. StallGuard for sensorless homing. The integrated power MOSFETs handle motor currents up to 2A RMS with protection and diagnostic features for robust and reliable operation. A simple to use UART interface opens up tuning and control options. Store application tuning to OTP memory. Industries’ most advanced STEP/DIR stepper motor driver family upgrades designs to noiseless and most precise operation for cost-effective and highly competitive solutions.
FEATURES AND BENEFITS
- 2-phase stepper motors up to 2.8A coil current (peak), 2A RMS
- STEP/DIR Interface with 8, 16, 32 or 64 microstep pin setting
- Smooth Running 256 microsteps by MicroPlyer™ interpolation
- StealthChop2™ silent motor operation
- SpreadCycle™ highly dynamic motor control chopper
- StallGuard4™ load and stall detection for StealthChop
- CoolStep™ current control for energy savings up to 75%
- Low RDSon, Low Heat-Up LS 170mΩ & HS 170mΩ (typ. at 25°C)
- Voltage Range 4.75… 29V DC
- Low Power Standby to fit standby energy regulations
- Internal Sense Resistor option (no sense resistors required)
- Passive Braking, Freewheeling, and automatic power down
- Single Wire UART & OTP for advanced configuration options
- Integrated Pulse Generator for standalone motion
Technical Specifications
| Model | TMC2226 |
|---|---|
| Interface | Step/Dir |
| Configuration | CFG Pins or UART |
| Native Microsteps | up to 1/256 |
| microPlyer Microsteps | 1/256 |
| Logic Voltage (VIO) | 3-5V |
| Motor Voltage (VM) | 4..75-29V |
| Motor Phase Current max | 2A RMS, 2.8A Peak |
| Internal V- Regulator | enabled |
| RDSon | <=0.17 Ohm |
| stealthChop (quiet) | yes |
| spreadCycle | yes |
| coolStep | yes |
| stallGuard | yes |
| dcStep | no |
Pin Functions
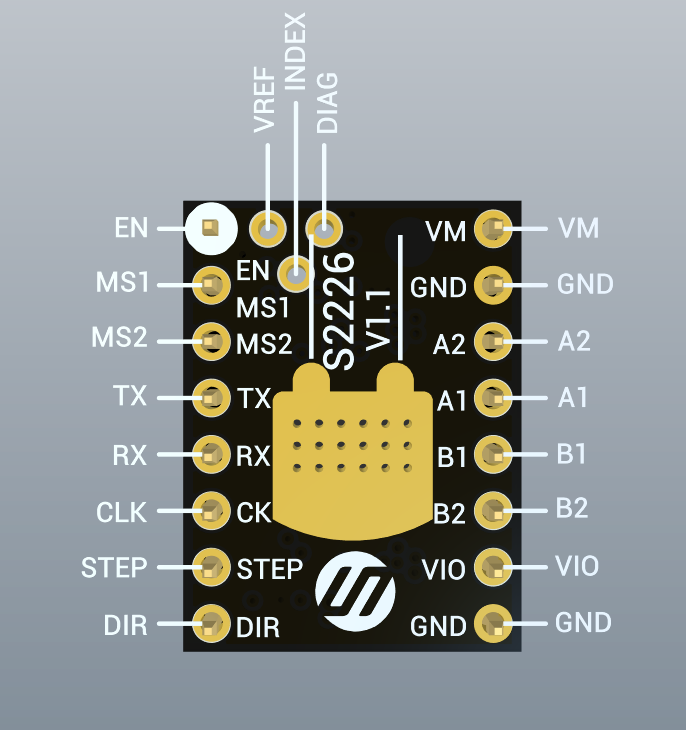
| Pin | Function |
|---|---|
| Power Supply | |
| GND | Ground |
| VM | Motor Supply Voltage |
| VIO | Logic Supply Voltage |
| Motor Outputs | |
| A1 | Motor Coil 1 |
| A2 | Motor Coil 1 |
| B1 | Motor Coil 2 |
| B2 | Motor Coil 2 |
| Control Inputs | |
| STEP | Step-Signal Input |
| DIR | Direction-Signal Input |
| TMC2226 | |
| EN | Enable Motor Outputs: GND=on, VIO=off |
| MS1 | Step-Configuration |
| MS2 | Step-Configuration |
| RX/TX | Optional UART Input/Output. |
| CLK | CLK input. Tie to GND using short wire for internal clock or supply external clock. |
| DIAG | Diagnostics Output |
| INDEX | Index Output |
| VREF | Analog Reference Voltage |
Interface Resources
Wiring Diagram
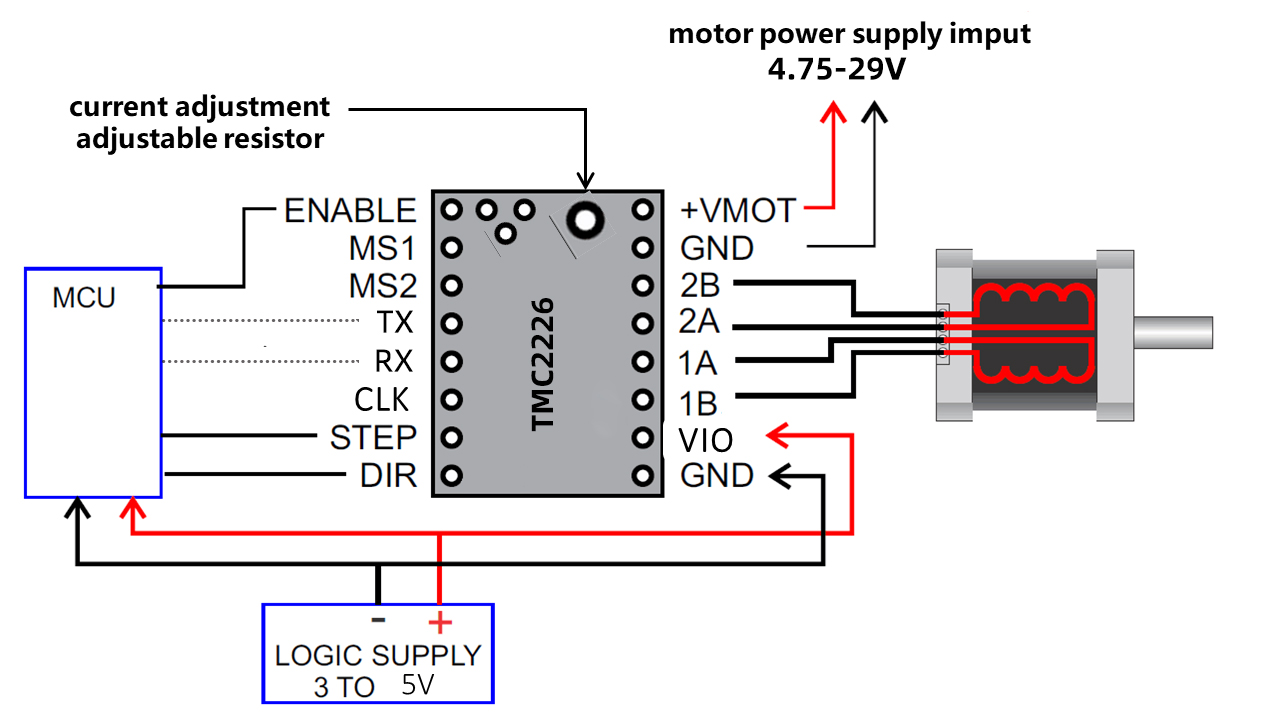
Title
The TMC2208 outputs continuous motor current up to 1.4A and peak current up to 2A. Therefore, the reference voltage of the driver module should not exceed 1V. At the same time, the driver module must be dissipated, otherwise it will affect the life of the driver module.
Motor Current Setting
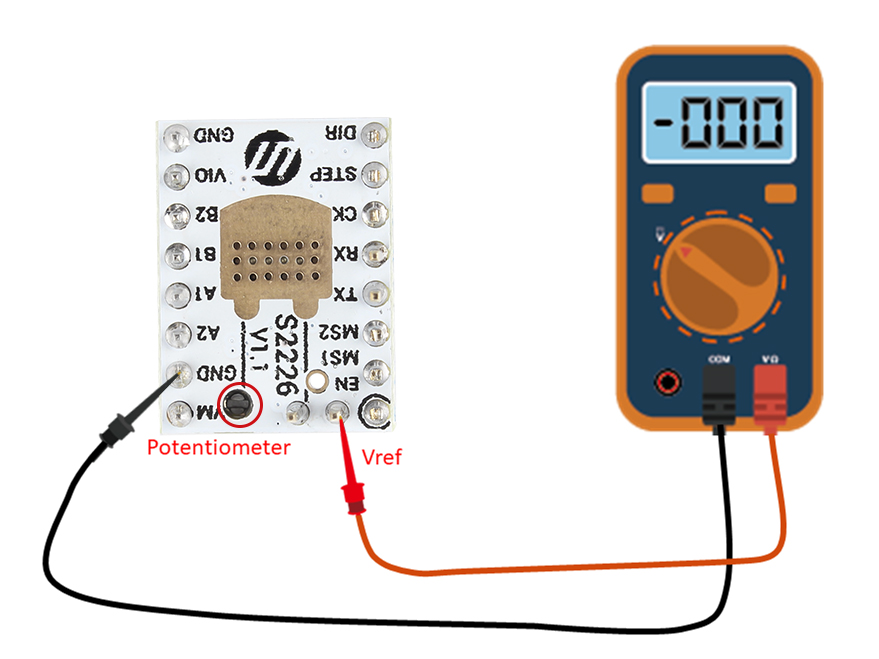

The best way to set the motor current is by measuring the voltage on the Vref pin (0…2.5V) and adjusting the voltage with the potentiometer. The maximum settable motor current is 1.77A RMS (0.11Ohm sense resistors).
Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71
Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax
Vref -> Voltage on Vref pin
Irms -> RMS (Root Mean Square) current per phase (Irms = Imax / 1.41)
Imax -> Maximum current per phase (Imax = Irms * 1.41)
Note
1. Vref measures Gnd and the voltage at the middle of the potentiometer.
2. Do not connect the motor when measuring the voltage, otherwise it is easy to burn the driver.
3. Power should be connected when measuring voltage, do not just connect USB power supply.
4. Please pay special attention to directions!
Calculator
Micro-stepping
| MS2(-) | MS1(-) | Steps(-) | Interpolation(-) | Mode(-) |
|---|---|---|---|---|
| GND | VIO | 1⁄2 | 1⁄256 | stealthChop2 |
| VIO | GND | 1⁄4 | 1⁄256 | stealthChop2 |
| GND | GND | 1⁄8 | 1⁄256 | stealthChop2 |
| VIO | VIO | 1⁄16 | 1⁄256 | stealthChop2 |
Setting Method
With the TMC2208 Configurator you can change the settings and program the OTP (One-Time-Programmable) memory of a Trinamic TMC2226 via the UART interface.
To run the program:
- Install ScriptCommunicator
- Download TMC2208.scez
- Start the TMC2208.scez file with the ScriptCommunicator: ScriptCommunicator TMC2208.scez
- Choose the right serial port and click Connect
- Modifications in the Configurator are directly transmitted
Tip
The OTP bits can be programmed only one time.
If you enable spreadCycle then TOFF cannot be 0 (null).
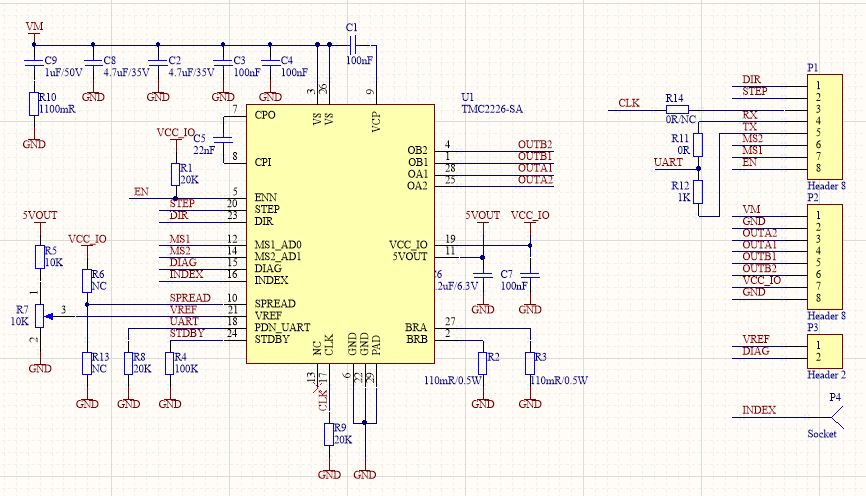
Schematic diagram
Tech Support
Please submit any technical issue into our forum