TMC2208
Product Introduction
TMC2208 is an ultra-quiet two-phase stepper motor drive chip, continuous drive current 1.4A, peak current 2A, voltage range 4.75V-36V, 256 subdivision. The flexible microPlyer interpolation unit provides up to 256 subdivisions, allowing perfect sinusoidal control even in systems with limited pulse frequencies; these are also designed because stealthChop2 ultra-quiet technology is widely used in 3D printing. Compatible with existing 3D printer electronics, eliminating the expensive costs of redesign. With a standard step/dir interface, it is easy to use. It can replace the original TMC2100, lower heat, especially for 3D printing market.
Features
- UART configuration interface (9600-500k Baud)
- Power tube built-in drive current 1.4A ,peak current 2A, voltage range 4.75V-36V
- Up to 256 native microsteps (without interpolation)
- CoolStep ™ current dynamic adjustment technology, can save 70% of the energy
- stealthChop2 - faster motor acceleration/deceleration than stealthChop
- dcStep ™, stallGuard2 ™ stall detection technology
- Automatic stealthChop and spreadCycle switchover depending on velocity
- Hardware compatible with StepStick and Pololu A4988 Stepper Driver
- Components on bottom PCB side for better heat emission
- Automatic standby current reduction
- SteaClthhop mute technology
- spreadCycle - highly dynamic motor control chopper
Technical Specifications
| Model | TMC2208 |
|---|---|
| Interface | Step/Dir |
| Configuration | CFG Pins or UART |
| Native Microsteps | up to 1/256 |
| microPlyer Microsteps | 1/256 |
| Logic Voltage (VIO) | 3-5V |
| Motor Voltage (VM) | 5.5-36V |
| Motor Phase Current max | 1.2A RMS, 2.0A Peak |
| Internal V- Regulator | enabled |
| RDSon | <=0.3 Ohm |
| stealthChop (quiet) | yes |
| spreadCycle | yes |
| coolStep | no |
| stallGuard | no |
| dcStep | no |
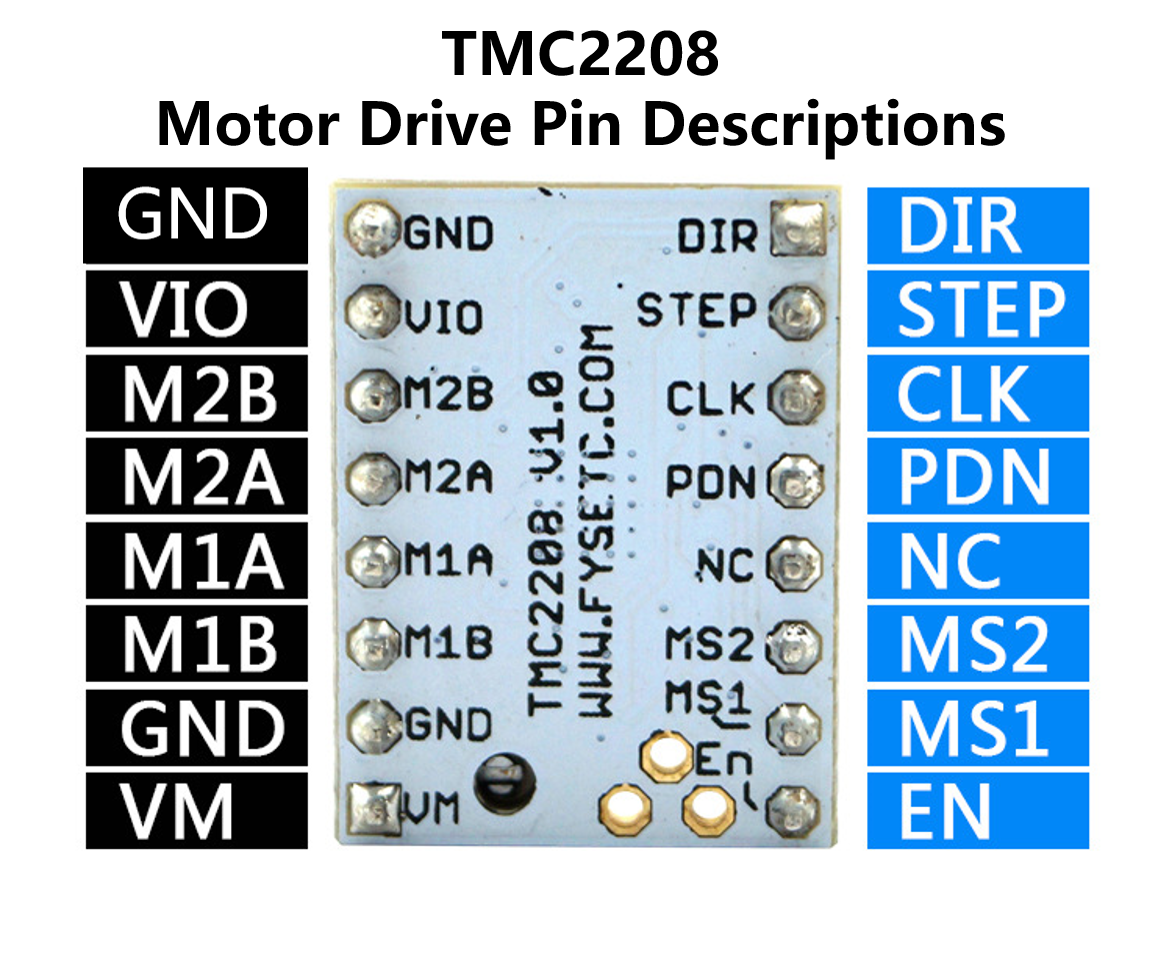
Pin Functions
| Pin | Function |
|---|---|
| Power Supply | |
| GND | Ground |
| VM | Motor Supply Voltage |
| VIO | Logic Supply Voltage |
| Motor Outputs | |
| M1A | Motor Coil 1 |
| M1B | Motor Coil 1 |
| M2A | Motor Coil 2 |
| M2B | Motor Coil 2 |
| Control Inputs | |
| STEP | Step-Signal Input |
| DIR | Direction-Signal Input |
| TMC2208 | |
| EN | Enable Motor Outputs: GND=on, VIO=off |
| MS1 | Step-Configuration |
| MS2 | Step-Configuration |
| PDN | UART and Auto Power Down Control: GND=on, VIO=off |
| CLK | Clock Input |
| DIAG | Diagnostics Output |
| INDEX | Index Output |
| VREF | Analog Reference Voltage |
Interface Resources
Wiring Diagram
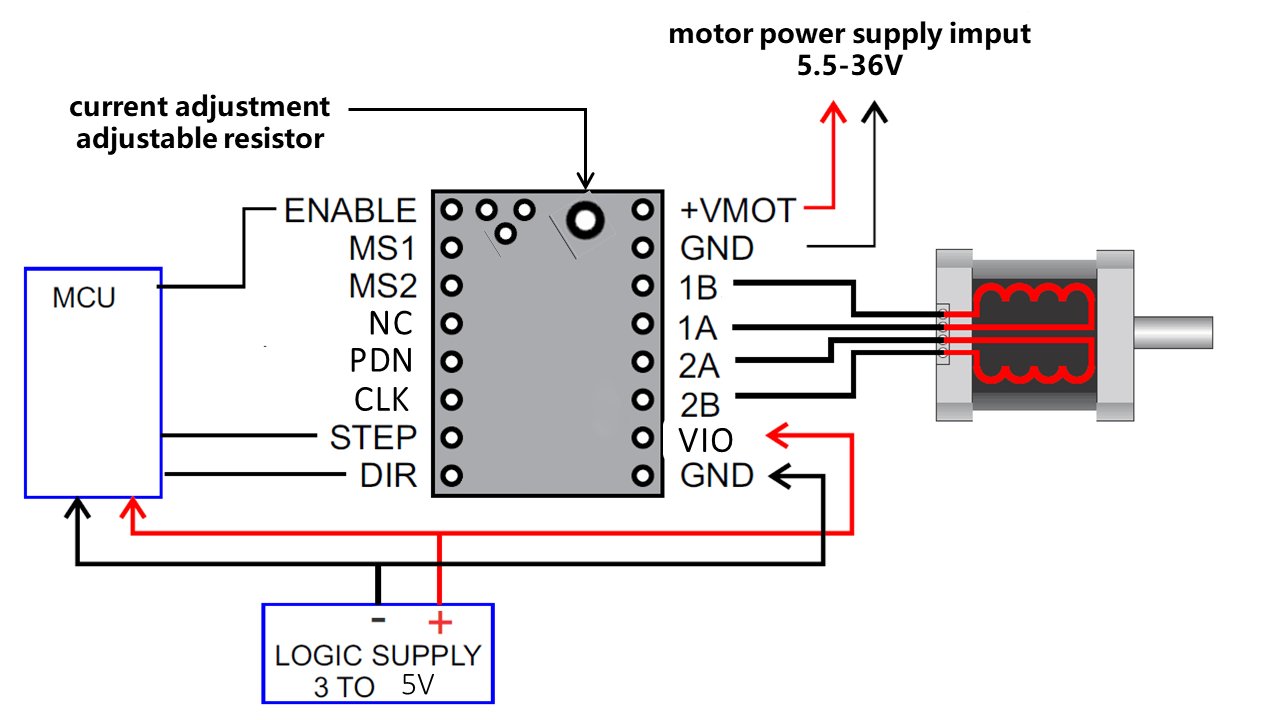
The TMC2208 outputs continuous motor current up to 1.4A and peak current up to 2A. Therefore, the reference voltage of the driver module should not exceed 1V. At the same time, the driver module must be dissipated, otherwise it will affect the life of the driver module.
Motor Current Setting
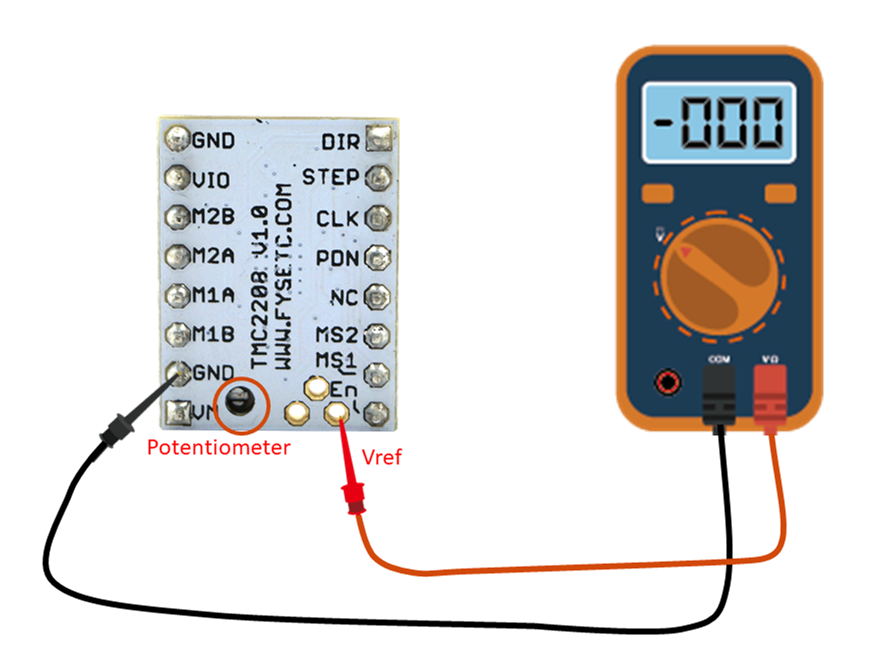
The best way to set the motor current is by measuring the voltage on the Vref pin (0…2.5V) and adjusting the voltage with the potentiometer. The maximum settable motor current is 1.77A RMS (0.11Ohm sense resistors), but the SilentStepSticks can only be used up to 1.2A RMS.
Irms = (Vref * 1.77A) / 2.5V = Vref * 0.71
Vref = (Irms * 2.5V) / 1.77A = Irms * 1.41 = Imax
Vref -> Voltage on Vref pin
Irms -> RMS (Root Mean Square) current per phase (Irms = Imax / 1.41)
Imax -> Maximum current per phase (Imax = Irms * 1.41)
1. Vref measures Gnd and the voltage at the middle of the potentiometer.
2. Do not connect the motor when measuring the voltage, otherwise it is easy to burn the driver.
3. Power should be connected when measuring voltage, do not just connect USB power supply.
4. Please pay special attention to directions!
Calculator
Micro-stepping
| MS2(-) | MS1(-) | Steps(-) | Interpolation(-) | Mode(-) |
|---|---|---|---|---|
| GND | VIO | 1⁄2 | 1⁄256 | stealthChop2 |
| VIO | GND | 1⁄4 | 1⁄256 | stealthChop2 |
| GND | GND | 1⁄8 | 1⁄256 | stealthChop2 |
| VIO | VIO | 1⁄16 | 1⁄256 | stealthChop2 |
Setting Method
With the TMC2208 Configurator you can change the settings and program the OTP (One-Time-Programmable) memory of a Trinamic TMC2208 via the UART interface.
To run the program:
- Install ScriptCommunicator
- Download TMC2208.scez
- Start the TMC2208.scez file with the ScriptCommunicator: ScriptCommunicator TMC2208.scez
- Choose the right serial port and click Connect
- Modifications in the Configurator are directly transmitted
The OTP bits can be programmed only one time.
If you enable spreadCycle then TOFF cannot be 0 (null).
Hardware Connection
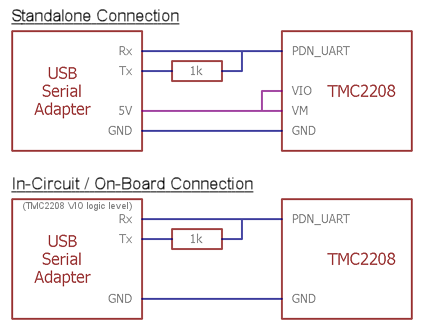
You can use every RS232 serial adapter with 0-5V logic levels (e.g. FTDI-Breakout) and the SilentStepStick Tester/Programmer can be used as connection adapter.
The jumper next to the PDN_UART pin has to be closed on the TMC2208 SilentStepStick to enable the pin access via the pin header.
Versions Difference
| Versions | difference |
|---|---|
| V1.0 | The default is standalone mode,If you need UART mode,you must config by yourself. |
| V1.2 | UART mode, it’s used for F6. |
Shop
Tech Support
Please submit any technical issue into our forum